













Nel processo di saldatura, l’automazione genera valore reale quando riesce a intervenire non soltanto sulla velocità del gesto, ma sull’organizzazione complessiva del ciclo. È una distinzione importante, perché molti dei limiti che ancora frenano la produttività in officina non derivano dalla sola esecuzione della saldatura, quanto piuttosto dalla frammentazione delle postazioni, dai tempi improduttivi tra un’operazione e l’altra, dall’eccesso di presidio umano richiesto da impianti poco razionalizzati. Il caso sviluppato da PeyMar, produttore messicano di poltrone odontoiatriche, si colloca precisamente su questo piano.
Per realizzare i telai e i diversi componenti metallici delle proprie sedute, l’azienda si trovava a dover gestire una configurazione tradizionale che richiedeva più operatori, più macchine e più stazioni dedicate, con effetti evidenti sul piano dei colli di bottiglia, dei tempi ciclo e della saturazione degli spazi. A questo si aggiungevano l’aumento dei costi di manodopera e una certa difficoltà nell’integrare robot, generatori di saldatura e accessori in un sistema sufficientemente flessibile da adattarsi alle esigenze produttive.
La risposta è arrivata attraverso lo sviluppo di una cella personalizzata basata su un cobot Dobot CR20A installato su una guida lineare e abbinato a una saldatrice Miller Electric Manufacturing. La configurazione consente a un solo braccio collaborativo di operare in continuo su sei stazioni di saldatura, con la supervisione di un unico addetto. Il principio è semplice, ma industrialmente molto efficace: mentre il cobot esegue la saldatura su una postazione, l’operatore può rimuovere il pezzo finito e predisporre quello successivo in un’altra, riducendo i tempi morti e migliorando la continuità del ciclo.
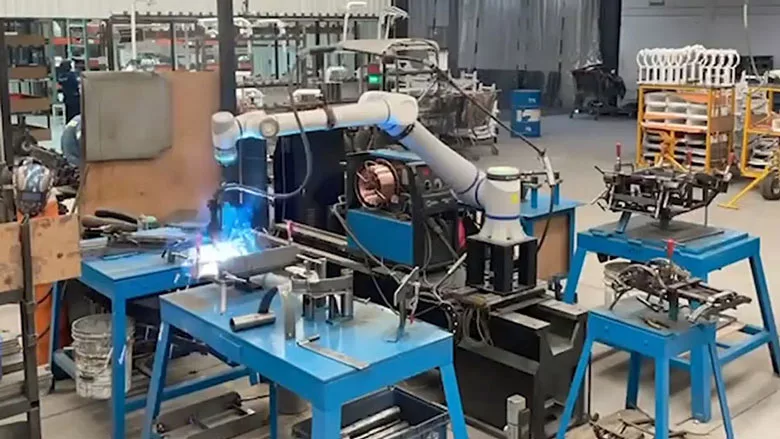
È proprio qui che il progetto mostra il suo interesse. Il cobot non viene impiegato come sostituzione puntuale di una postazione manuale, ma come elemento mobile capace di servire più stazioni all’interno di una logica di produzione più compatta. In questo modo PeyMar ha ottenuto un duplice risultato: da un lato un uso più efficiente della superficie disponibile in reparto, dall’altro una riduzione dei costi legati al personale, agli investimenti in attrezzature replicate e alla manutenzione di più sistemi distinti.
Sul piano tecnico, il CR20A è un robot collaborativo con portata massima di 20 kg e sbraccio di 1.700 mm. Il sistema è dotato di un end-effector a doppio canale, concepito per collegarsi direttamente a più utensili terminali, e di un indicatore visivo di stato alla base, utile per una lettura immediata delle condizioni operative. Dobot segnala inoltre l’impiego di un algoritmo avanzato di controllo del movimento che consente al robot di lavorare con maggiore stabilità, riducendo del 50% le vibrazioni residue durante le frenate di emergenza ad alta velocità.
Più in generale, il caso PeyMar si inserisce nell’offerta della nuova serie CRA di Dobot, sviluppata per coniugare velocità, sicurezza e stabilità. La velocità dei giunti raggiunge i 223 gradi al secondo, mentre il ricorso a un bus EtherCAT per il servomotore contribuisce a migliorare la rapidità di risposta e la fluidità della traiettoria. La precisione assoluta di posizionamento, ottenuta tramite calibrazione laser, viene dichiarata inferiore a 0,4 mm, un valore che amplia il raggio d’impiego del cobot anche in attività in cui la ripetibilità resta un fattore determinante.
Sul fronte della sicurezza, il robot è governato da un controllore indipendente classificato PLd Cat.3, integra oltre 20 funzioni di sicurezza ed è certificato secondo gli standard ISO 13849-1, ISO 10218-1 e ISO/TS 15066. In presenza di una corretta valutazione del rischio, ciò consente l’impiego collaborativo senza protezioni perimetrali aggiuntive. In caso di perdita di alimentazione interviene inoltre un freno elettromagnetico entro 18 millisecondi, mantenendo la posizione entro 1 mm.
Completano il profilo del sistema la possibilità di programmare aree di sicurezza virtuali, l’opzione di una safety skin per l’arresto immediato in caso di contatto, la disponibilità di interfacce DI/DO compatibili con logiche PNP e NPN, e il supporto ai protocolli Modbus TCP/RTU, EtherNet/IP e Profinet per l’integrazione con PLC, HMI e altri dispositivi. La programmazione avviene attraverso il software DobotStudio Pro, che combina una logica a blocchi per le applicazioni più immediate con la possibilità di sviluppi avanzati tramite LUA script.
Resta però il dato sostanziale del progetto PeyMar: la scelta di collocare il cobot su una guida lineare ha trasformato un robot collaborativo in una risorsa di reparto capace di coprire più postazioni, con una razionalizzazione concreta del processo di saldatura, in un momento in cui molte aziende cercano nell’automazione una risposta ai limiti di spazio, ai costi di struttura e alla difficoltà di reperire manodopera specializzata.





{kind=link}